
Vector sketch animation generation with differentiable motion trajectories
Published in EuroGraphics, 2026
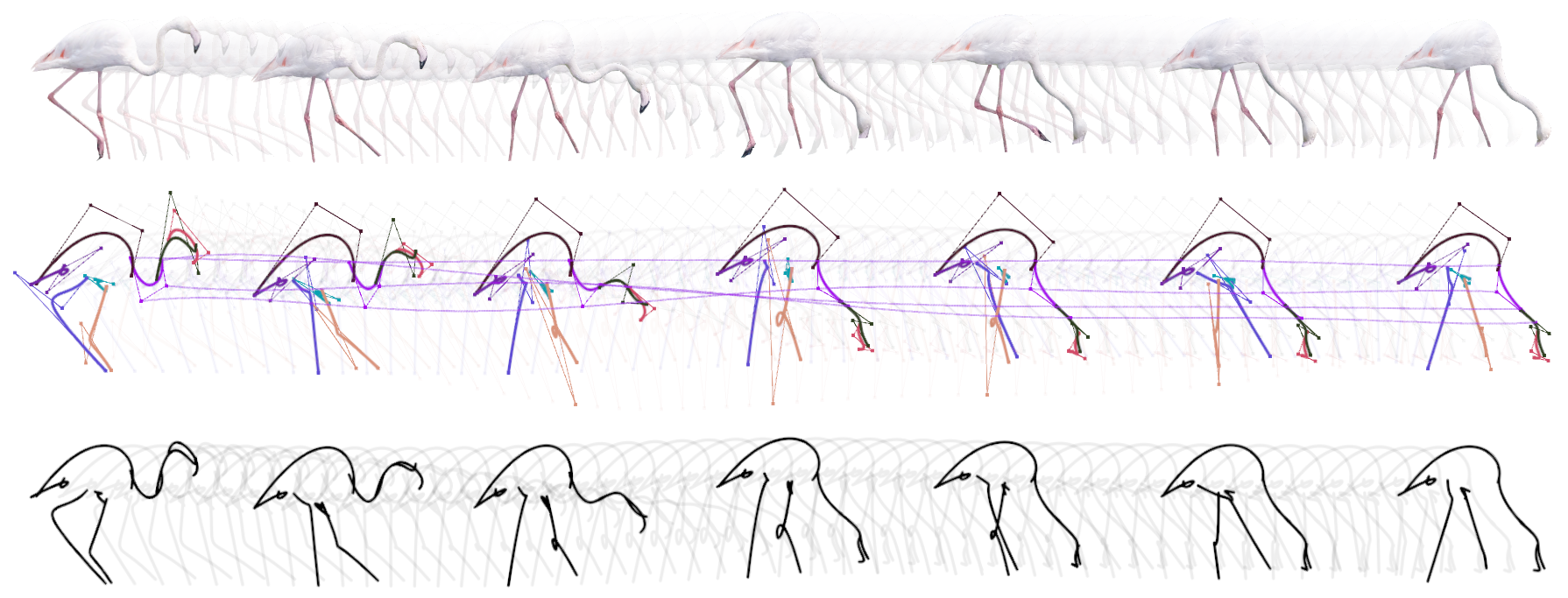
Our method converts an object video (top) into a 2D vector sketch animation (bottom). We propose a differentiable motion trajectory with Bernstein basis to model cross-frame movement of stroke control points. The visualization in the middle displays their trajectories from a single stroke, and our approach boosts temporal/semantic consistency, performing robustly for sparse strokes and long videos.
The project website can be found in here.
Open-source codes can be found here.
Here are the project and codes.
Abstract: Sketching is a direct and inexpensive means of visual expression. Though image-based sketching has been well studied, video-based sketch animation generation is still very challenging due to the temporal coherence requirement. In this paper, we propose a novel end-to-end automatic generation approach for vector sketch animation. To solve the flickering issue, we introduce a Differentiable Motion Trajectory (DMT) representation that describes the frame-wise movement of stroke control points using differentiable polynomial-based trajectories. DMT enables global semantic gradient propagation across multiple frames, significantly improving the semantic consistency and temporal coherence, and producing high-framerate output. DMT employs a Bernstein basis to balance the sensitivity of polynomial parameters, thus achieving more stable optimization. Instead of implicit fields, we introduce sparse track points for explicit spatial modeling, which improves efficiency and supports long-duration video processing. Evaluations on DAVIS and LVOS datasets demonstrate the superiority of our approach over SOTA methods. Cross-domain validation on 3D models and text-to-video data confirms the robustness and compatibility of our approach.
Recommended citation: Xinding Zhu, Xinye Yang, Shuyang Zheng, Zhexin Zhang, Fei Gao, Jing Huang, Jiazhou Chen. “Vector sketch animation generation with differentiable motion trajectories.” EuroGraphics 2026. 2026.